
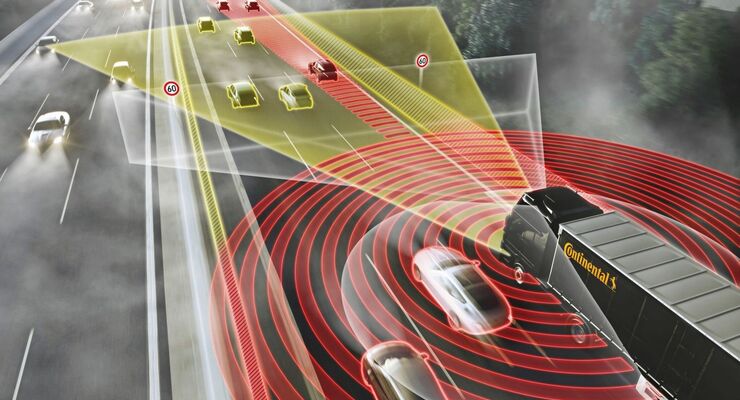
Wie nimmt ein autonom fahrender Lkw seine Umgebung wahr? Die Grafik visualisiert sein "Sichtfeld".
Um Fahrfunktionen automatisieren zu können, müssen Nutzfahrzeuge ihr Umfeld erkennen. Es gibt eine Vielzahl an Sensoren, die dafür infrage kommen. Ultraschallsensoren und 360-Grad-Kameras (innerer Kreis) decken das direkte Fahrzeugumfeld bis zehn Meter ab, Radarsensoren (äußerer Kreis) reichen bis 100 Meter und darüber. In diesen Bereich sehen auch nach vorn gerichtete Kameras (graues Dreieck), etwa um Verkehrszeichen zu erfassen. Am weitesten reichen LIDAR- (150 Meter) und Fernbereichsradar-Sensoren (bis 250 Meter, gelbes Dreieck und rote Fahrspur-Trajektorie). Bei alledem gilt: Erst die intelligente Verknüpfung aller Sensordaten ermöglicht ein umfassendes Bild der aktuellen Verkehrslage.








